List of Research Topics
Research in Progress
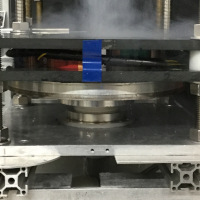
High Temperature Superconducting Levitation Flywheel
We are researching to construct a magnetic bearing that can be controlled and stabilized by a superconductor. This magnetic bearing enables low friction and high speed rotation of the flywheel.
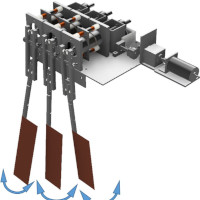
Traveling Wave Propulsion Device
We are developing actuators that can generate traveling waves that simulate the movement of fishes. This device uses a vibrating motor with a permanent magnet, and is characterized by high frequency, high displacement and high thrust.
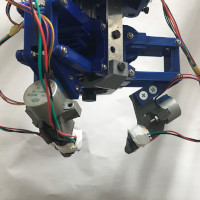
Flexible Fingertip
Research to attach a flexible object to the robot's finger and grasp it without damaging fragile objects. In this research, magnetic functional fluid is packed in a flexible rubber bag and attached to the robot's fingertips.
Stopped Researchs
There is a possibility to resume.

Electromagnetic Projector
We are studying the behavior of an electromagnetic projector in which the magnetic field of a permanent magnet is given in advance.
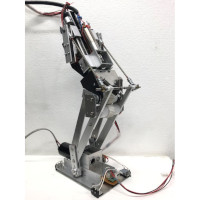
Jumping robot
We are developing single-leg, multi-joint jumping robots. The purpose is to reproduce human jumping motion.
High Temperature Superconducting Levitation Synchronous Motor
High-temperature superconducting levitation system with features such as no friction, high-speed movement, and high-speed rotation. In this research, we are researching stable driving by driving force from the vertical direction, not from driving force from the horizontal direction by existing motor technology etc.
No Image
Magnetic Adsorption Transfer Type Inspection Robot in Piping
We are developing a pipe inspection robot that can move vertically in the pipe that handles hazardous substances by magnetic adsorption. We inherited from Nagaya Lab.
No Image
Iron Powder Built-in Bellows Actuator
We inherited from Nagaya Lab.
No Image
Magnetic Gear
We are developing non-contact gears using magnetic force.

Development of Lightweight Composites for Robots